
2018首届中国高校智能机器人创意大赛获奖作品展示
2018首届中国高校智能机器人创意大赛参赛队获奖情况:
参赛作品名称 | 参赛队员 | 指导老师 | 校内组队单位 | 奖项 |
仿生水母机器人 | 储诚中、胡奇强、方承强 | 董二宝 | 工程科学实验教学中心 | 一等奖 |
“智越者”机器人 | 汪明贵、陈文博、李喆昊 | 许旻 董二宝 | 工程科学实验教学中心 | 二等奖 |
柔体仿生机器鱼 | 夏期荣、冯新宇、李海昌 | 董二宝 | 工程科学实验教学中心 | 二等奖 |
SMA人工肌肉仿生灵巧手 | 韩广明、祝晶、朱开元 | 董二宝 | 工程科学实验教学中心 | 三等奖 |
仿生水母机器人
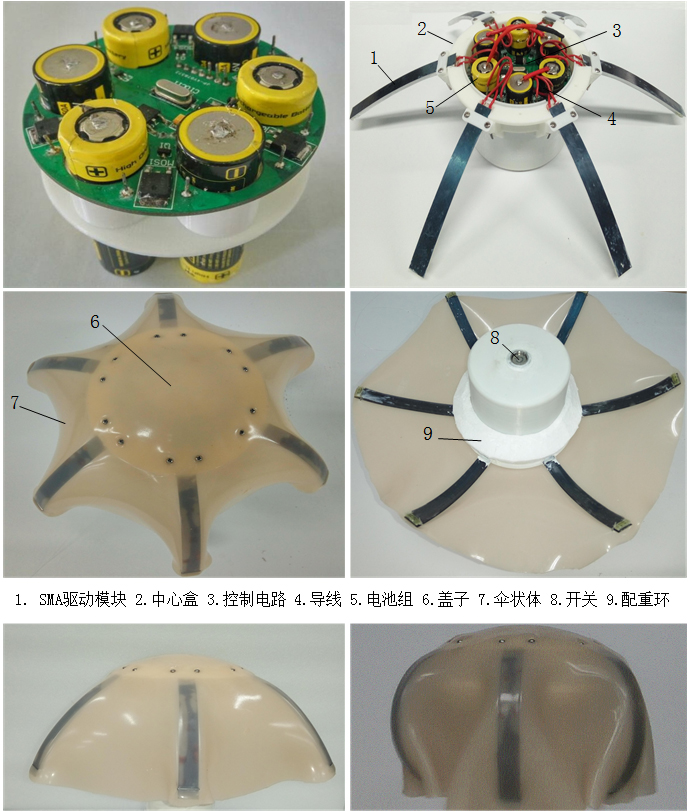
以仿生水母机器人为研究对象,作者充分调研了目前家居机器人的研究现状,大部分都是以释放人类体力与脑力为目标,而忽视了“家”的真正含义;在这个的基础上作者提出了智能家居的新方向—情感交互。整个项目的最终目标是为了营造一个真正的智能家居,让科技与人类情感产生共鸣,采用形状记忆合金智能材料设计驱动器,基于此驱动器制作一种仿生水母机器人。
整个仿生水母机器人由三部分组成:驱动器模块—形状记忆合金丝经PDMS材料浇注后固化得到;外部结构模块—3D打印制作外壳封装以及硅胶浇注蒙皮;内部电路模块—包括电源开关电路、控制电路,并留下足够空间扩展后续电路。仿生水母机器人可应用的技术:无线充电—日趋成熟的无线充电技术应用在仿生水母上可实现自主续航;在线控制—通过无线数传模块将仿生水母与外部服务器相连,实现实时控制;配合安装有麦克风阵列的智能水族箱,实现人机语音交互,让仿生水母更加智能,人性化。
仿生水母功能定位:
家庭娱乐——配合搭载灯光、麦克风阵列等终端的智能水族箱会让仿生水母生动起来;
科普教育——避免真实水母带来的毒性伤害,也在传播海洋生物知识的同时保护它们;
情感补足——仿生水母利用不同旋律的舞蹈和灯光表达自己的感情,让交互更加生动有趣,治愈情感。
该仿生水母机器人由驱动器模块、内部电路模块、外部结构模块三部分组成。经团队合作成功设计了驱动器模块以及外部结构模块后,主要对内部电路模块进行验证以及扩展功能的尝试。经过两个月的设计制造,生产了第一台物理样机,并对其进行了试验,从而验证了系统的可靠性、实用性以及可行性。
“智越者”号高性能越障机器人

以具有可跨越障碍物性能的机器人为研究对象,作者充分调研了目前越障机器人的研究现状,在这个的基础上分析当前越障机器人的越障结构和越障性能。整个项目的最终目标是通过设置机器人将要越障的高度,分析和优化机器人越障机构的尺寸,设计出一款能够满足越障高度要求的机器人,并通过仿真和实验对机器人的越障性能进行验证。
一般来说,机器人跨越有障碍物的地形有主动越障和被动越障两种,主动越障机器人需要根据环境条件主动的调整结构来适应地形,因此需要具备良好的地形感知能力,并能够根据地形准确的进行运动控制,这就增加了机器人设计和控制难度。而被动跨越机器人的机构能够根据地形被动地进行自我结构调整来适应地形,不需要传感设备和太复杂的控制系统,可以大大降低设计难度。
为实现这种目的,我们小组自主设计和制作了一款能够被动跨越障碍物和自适应非结构化地形的六轮机器人。它在结构上采用了可自适应调整的四边形结构,使其拥有良好的越障及适应复杂路面的能力。该机器人车高340mm,具有跨越单个240mm(相当于车轮直径的1.5倍)障碍物和连续台阶的能力,并且在翻越障碍物时不需要外部地面条件的先验信息,被动地适应地形。这种良好的越障性能和被动适应地形能力,可以使机器人能够在有台阶和坑洼不平的环境中自由行走,提高了机器人对地形的适应能力。这种机器人具有的这种特点可以为未来智能机器人进入非结构化环境中工作提供一种结构参考。
该越障机器人分为机械系统、电路系统和控制系统三个部分。本文重点展开了对机器人越障机构部分的分析和优化,通过结构优化,验证了机器人在仿真过程中顺利跨越设计高度的障碍物、连续的台阶和斜坡的能力。经过两个多月的设计制作,生产出第一台物理样机,对其进行试验,从而验证了系统良好的越障性能和实用性。
柔体仿生机器鱼

设计了一种基于形状记忆合金人工肌肉驱动的柔性仿生机器鱼。该款机器鱼的创新点有:1.用形状记忆合金制成的人工肌肉驱动器取代常规的电机作为驱动单元,人工肌肉驱动器以鱼类的肌肉-骨骼-脊柱为仿生对象,重量轻,结构简单,且无噪声。2.采用特殊的柔性材料制作机器鱼的鱼体,既不影响人工肌肉的正常工作,又使得小佳鱼身的摆动与真实鱼类高度相似。
仿生机器鱼的研究意义在于可以让用户拥有一个属于自己的丰富多彩的未来鱼类水族馆,亲临鱼类行为现场感受其所运用的高科技知识和研制过程中的困难和成就。同时,该柔性仿生机器鱼具备高度合理的人机环境设计的特点,其高度精密的监视系统使其也可以充当未来家庭的安全保障。
仿生机器鱼作为一个完整的机器人系统,由鱼体结构、电控系统和驱动模块三部分组成。电控系统中又需要包括传感器单元、通信单元和电源系统。机器鱼的鱼体结构由3D打印材料和特殊柔性材料综合制作而成。它的驱动模块采用形状记忆合金制成的人工肌肉驱动器使得机器鱼的游动行为与真实鱼类高度相似。电源系统采用了电磁感应式的无线充电技术。无线充电装置可放置于鱼缸某处,使机器鱼不用离开鱼缸即可完成充电。
机器鱼的鱼体内部配备了语音模块、无线WIFI模块、摄像头、红外传感器和姿态传感器等多种不同功能的传感器,使其具备了人机交互、摄像监控、语音交流、自主避障和自身姿态调节的功能。用户可通过手机专用的APP命令小佳水下运动、拍照、放音乐等,机器鱼也会将其自身和周围的环境数据实时反馈给用户。
该柔性仿生机器鱼的制作分人工肌肉驱动器设计、机器鱼机械系统设计和控制系统设计三个方面。经过三个月的设计制作,完成了第一代和第二代仿生机器鱼,并对其进行了试验,验证了系统的可靠性和实用性。
SMA人工肌肉仿生灵巧手

仿生灵巧手的研制主要目的在于解决身体障碍者在家庭中的诸多不便,让残疾人拥有一款美观真实并且柔软灵巧的智能假手,帮助他们解决衣、食、住、行上的各种难题。当然,仿生灵巧手还可以用作服务机器人的末端机械手,完成相应的实操任务。
本作品依照人手仿生学原理,采用形状记忆合金(SMA)丝作为人工肌肉设计和制作了一款外形具有高仿真性、动作具有高逼真性且工作稳定、寿命长、成本低的柔性多指仿生灵巧手。该灵巧手由软体材料制成,具有小巧、轻便、安全、灵活的特性,对抓取物与操作者不会造成伤害,特别是操作涉及到柔软、脆嫩的对象,或是涉及碰撞、需求阻尼的场合,其优势便显现出来。该柔性灵巧手有望取代传统机械手成为人类未来生活的最亲密伙伴,其主要特点有:(1)全新的驱动方式:采用智能材料SMA丝作为驱动源,具有能力密度高、成本低、承载能力强、响应快、无声操作且具有自感知能力的优点,而且启动与控制简单;(2)外表高仿真性,柔性外皮不会对操作者与目标物造成损伤;(3)动作高逼真性:手指弯曲幅度、响应时间、指尖输出力都与人手极为相似;(4)工作稳定,寿命长,测试中往复运行6×105次性能仍很稳定;(5)制作简单,成本低。
经团队近4个月的合作,现已完成第三代灵巧手主体模块和控制模块的设计与制作。并将肌电控制系统应用到了灵巧手中,实现灵巧手的人机交互操作,为其作为智能假肢的应用提供了基础。另外,将柔性仿生灵巧手与Kinova机械臂相结合,通过控制机械臂与灵巧手的运动可以完成更加多样的任务,并采用Tobii眼动仪系统控制机械臂运动,对于四肢障碍的残疾人来说仅用自己的眼睛,就能达到控制机械臂。目前已对灵巧手系统进行了多项试验,实现了系统高度的稳定性和极高的使用性。
Copyright © 2015 All rights reserved. 版权所有 中国科学技术大学工程科学实验教学中心 皖ICP备05002528号
地 址:合肥市蜀山区黄山路443号中国科学技术大学西校区 电 话:0551-63602476 邮 箱:huichun@ustc.edu.cn